

日前,小鹏汽车董事长何小鹏在其个人社交账号上发了一则视频,记录了他在美国体验特斯拉FSD V12.3.6版本的经历。虽然小鹏汽车一直被认为是特斯拉在智能驾驶方面最直接的竞争对手之一,但是何小鹏还是非常大度的夸赞了特斯拉FSD的表现。
![]()
何小鹏在微博中说到:“全程体验下来,FSD的表现还是很丝滑的。绝大部分路况处理都让我很安心,很像人类司机驾驶。但中国的道路比美国复杂程度更高,人流和车流更多,很期待FSD之后在中国的表现。”

▲何小鹏发布试驾特斯拉FSD视频
而从何小鹏发布的视频中也可以看到,FSD在转弯、绕行、进出匝道、切道方面表现的都很优秀,总体表现非常不错,但也有部分场景FSD的应对出现了问题,比如车辆中途出现了一次无故停车,在没有导航的情况下,车辆又自动前进;而在一次左转的过程中,何小鹏也进行过一次接管。
不过,作为对手,何小鹏认为小鹏XNGP的优势主要在于对于中国场景的适配,也喊话期待FSD在中国的具体表现。
同时,何小鹏也向马斯克发起了试驾XNGP的邀请。
在何小鹏此前发布的内容中,他也透露了自己也对Waymo的Robotaxi进行了体验,Waymo在旧金山城区的表现非常出色。

▲何小鹏发微博对比Waymo和特斯拉FSD
目前智能驾驶已经成为了全球车企共同追求的目标,特斯拉和小鹏汽车都是走在行业前列的企业,两个企业之间的互相试驾和切磋也有助于推动整个行业快速发展。
关于自动驾驶的未来,何小鹏非常乐观,他认为到2025年,自动驾驶将会出现“ChatGPT时刻”,将迎来革命性的突破和普及。
一、何小鹏试驾FSD 直言开的比自己好
何小鹏试驾完FSD V12.3.6版本后,其自动驾驶能力用他原话来形容就是,“作为一个在加州的新手司机,FSD大部分开的比我都好,我如果开,不会开的这么丝滑”。
从何小鹏发布的试驾视频可看出,高速路段上,特斯拉FSD行驶、切换车道、上下匝道都很丝滑,这都让何小鹏连连称赞。但何小鹏也指出来一点,旁边车道有车辆高速行驶时FSD依然会切道,并且在高速上切道的次数也相对较多。
何小鹏还提到,此前有次他试驾FSD时,前方有车切道,FSD仍然保持匀速行驶,并没有减速避让,若前车多行停0.2秒,两车就可能已经撞上了。
何小鹏就表示,XNGP会相对保守一些,切道次数不会很多,并且前方有其他车辆切道时XNGP会减速来保证安全。另外何小鹏还对XNGP高速口新增功能做了剧透,表示小鹏正在解决中国高速收费口的问题,以打通城区和高速智驾的界限。
而在城区中,特斯拉FSD的表现也非常出色。
在无保护左转场景下,车辆行驶到在路口时,当FSD识别到绿灯后,并且已经探测到左方道路没有行人及车辆通过,就进行了非常果断的左转,并且迅速切入车道,这让何小鹏直呼丝滑。
▲特斯拉FSD无保护左转非常丝滑
右转场景下,在车辆将要进行右转时,FSD也会让车辆提前几十米驶入右转道,在经过路口还会减速,然后进行右转。

▲特斯拉FSD在路口右转
遇到前方有锥形桶时,FSD也能提前避开障碍物,非常丝滑绕过道路中央的锥形桶,并不是行驶到跟前才进行绕行。另外FSD刹车时也很平稳,这些表现都让何小鹏称赞不已。

▲特斯拉FSD绕过锥形桶
尤其在经过一个路口时,何小鹏及车上的人还没找到路口红绿灯时、还在想要怎么过马路时,车辆已经识别到绿灯、行驶在路口中央并且将要完成穿过路口了,此时何小鹏才找到红绿灯的位置。过完马路何小鹏也笑了,说这次真得要为FSD鼓掌。
从表现上看,特斯拉FSD在城区策略会偏保守一些,前方有行驶中的车辆临时停车时,FSD会选择停车观察,等待前方车辆继续启动行驶时,FSD再进行一个跟车,并没有选择绕行策略。

▲特斯拉FSD在前车临时停车时选择跟车
另外经过路口时尽管没人FSD也会有约一两秒的停顿,此外过双岔路口时也会有零点几秒的停顿,会表现的比较犹豫。何小鹏认安全非常重要,虽然有停顿但保证了安全,并且停顿时间不长,也是比较舒适的。
▲特斯拉FSD在二岔路口停顿零点几秒
但试驾过程中FSD也出现了两次bug。
一次是在过红绿灯路口时,车辆本应该要左转,但FSD没能识别出绿灯,因此也没有通行,反而等到红灯时车辆往前挪了几次。但尴尬的是,美国有些路口的红绿灯是需要检测是否有车辆在等待左转,检测到等待左转车辆红灯才会变绿灯,但由于这次车辆已经过了红绿灯检测范围,因此左转灯会一直是红灯。

▲何小鹏在红绿灯处接管车辆
何小鹏一开始并没有接管,想看看左转灯一直是红灯的情况下FSD会有什么反应。结果就是,这样反反复复在路口等待了一分多钟后,车辆也没能通过路口,在直行灯是绿灯的情况下,车辆也没有选择直行,因此何小鹏这时候也选择接管,直行灯变绿时通过了路口。
而另外一次是何小鹏本想测试一下FSD转U型弯的能力,结果车辆在行驶过程中突然停在路边,没有任何原因。
▲特斯拉FSD在无导航情况下继续前进
就在何小鹏在查找原因时,又意外关闭了导航,但恰就是这时,在关闭导航的情况下,车辆突然起步开始行驶,这也令车上的人包括何小鹏都非常惊讶,何小鹏也调侃现在是真正的“全自动驾驶”,也不知道目的地是哪,也可能FSD要请他们喝杯咖啡,最终何小鹏也选择了接管。

▲何小鹏调侃特斯拉FSD在无导航下启动并行驶
何小鹏还表示,小鹏XNGP在中国的红绿灯识别会做的更好一些,小鹏在上面也花费了不少功夫。另外他还吐槽了FSD几个点,一是中控屏上还有很多内容没有画出来,例如绕行锥型桶时虽然丝滑,但交互界面没有显示锥桶;另外FSD V12.3.6版本还需要双手持方向盘,单手持会报警。
何小鹏最后还总结道,不管是FSD还是XNGP,为了能推广到全球市场,需要去学习车主的习惯,把车主历史习惯、实时需求结合到AI中,比如习惯在弯道处减速,或在驾驶过程中车主希望车辆可以保持迅速行驶。
在最后的彩蛋里,何小鹏提到XNGP现在还能识别一些小动物,虽然现在做的不够好,之后还会继续优化。另外,小鹏在四季度之后推出的车都会搭载电容方向盘,意味着只要手放在方向盘上,方向盘就可以识别出驾驶人并没有脱手分心驾驶。小鹏还在做车辆启动到泊车之间自动驾驶的打通,可以更方便车主出行,如果做成,这将会是非常cool的事情。
二、中美智驾双巨头 决战端到端
特斯拉智能驾驶技术的演变经历了从依赖外部技术到全栈自研的过程,智能驾驶系统研发可以追溯到2013年。
最初,特斯拉与Google合作开发半自动驾驶系统,但随后决定转向自主研发。2014年,特斯拉推出了搭载Mobileye技术的第一代自动驾驶硬件(HW 1.0),标志着其在自动驾驶领域的初步探索。
在硬件配置上,特斯拉逐步从依赖摄像头、超声波雷达和毫米波雷达,发展到完全抛弃雷达,甚至降低摄像头配置,实现了技术的自主创新。
2024年3月,特斯拉发布了FSD V12版本,这是其在“端到端”技术路线上的重大突破。
FSD V12通过Occupancy+Transformer框架作为基础模型,实现了感知和决策规划两大模块的算法“端到端”。
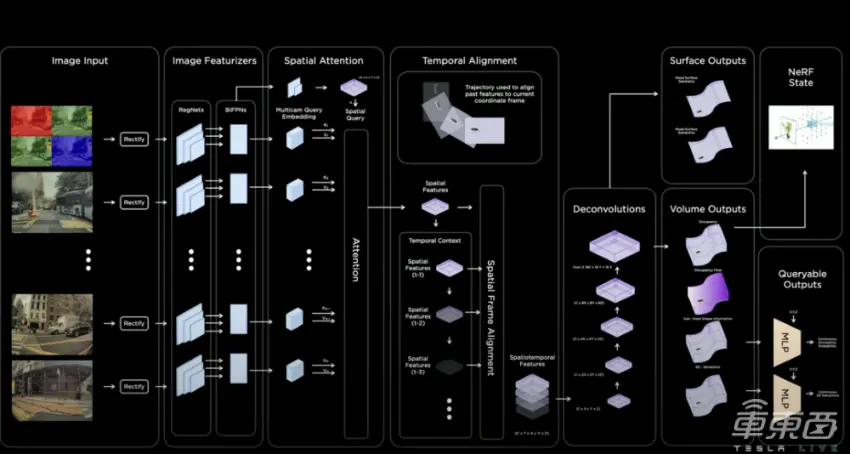
▲Occupancy Network结构
这一技术路径通过不断提升基础模型的能力,训练其掌握世界运行的规律,显著提升了自动驾驶系统的整体性能。
FSD V12的一个显著特点是其99%的决策由神经网络给出,大幅减少了对硬编码编程的依赖。新版本的代码从30多万行减少到仅2000行,标志着神经网络在自动驾驶中的核心作用。这种转变不仅简化了系统架构,还提升了系统的响应速度和准确性。
FSD V12依赖于高分辨率摄像头,通过深度学习算法进行实时环境感知。特斯拉开发了专门的计算机视觉模型,能够在各种复杂的道路环境中准确识别车辆、行人和其他障碍物。
同样走端到端路线的小鹏XNGP也有相似的算法路径。而这其中最大的不同便是特斯拉开始All in纯视觉技术,而小鹏则坚定支持激光雷达的视觉融合方案。
XNGP(XPENG Navigation Guided Pilot)是小鹏汽车开发的高级驾驶辅助系统。与特斯拉的FSD类似,XNGP旨在实现全场景的自动驾驶。XNGP的发展经历了多个阶段,从早期的XPilot系统逐步演变而来。
XNGP是小鹏汽车在自动驾驶技术上的最新版本,与之前的版本相比,XNGP采用了全新的神经网络架构,能够处理从感知到控制的所有驾驶任务。
资料显示,在XNet 1.0时代,小鹏使用BEV+Transformer技术,而在之后的2.0版本拿出了BEV+Transformer+Occupancy这样最新的端到端组合感知决策方案。

▲小鹏端到端大模型
XNGP采用了多传感器融合技术,包括摄像头、激光雷达和毫米波雷达。通过深度学习算法,系统能够精确识别和分类道路上的各种物体,并生成高精度的环境模型。
在决策与规划方面,XNGP的神经网络能够根据感知数据,进行实时路径规划和决策。系统能够自主选择最佳行驶路线,处理复杂的交通状况,确保驾驶的安全性和高效性。
小鹏汽车计划在2024年实现XNGP在全国主要城市路网的全覆盖,并在2025年将其推广至全球市场,未来小鹏将继续优化和提升XNGP的功能,打通行泊之间的界限,带给客户更丝滑的自动驾驶体验。
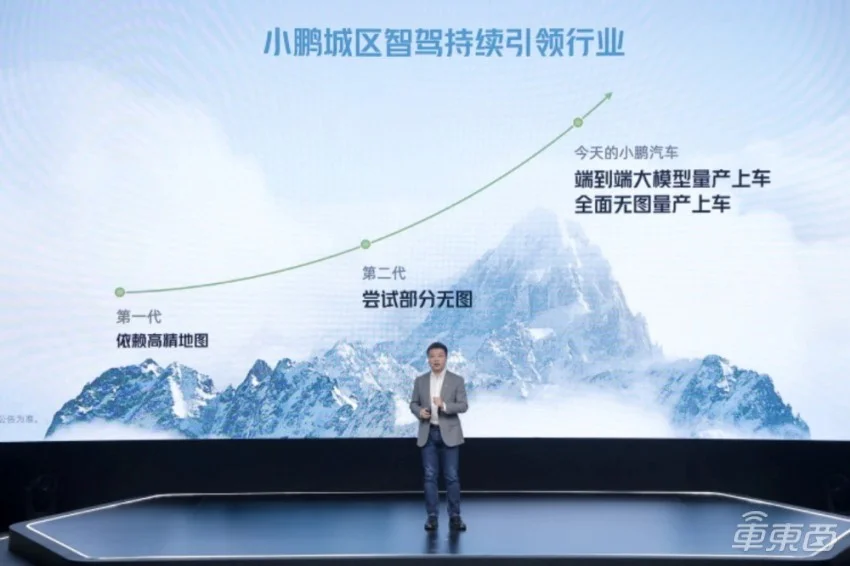
▲小鹏智驾系统发展
结语:高阶智驾“ChatGPT时刻”将至
在何小鹏试驾FSD的视频中,可以看出FSD在很多场景已经可以做到如老司机一般的丝滑,未来随着算法继续优化、端到端的更加深入,FSD将会表现地更为出色。
除了特斯拉,还有不少企业也已经有了相对成熟的自动驾驶产品,并且表现也非常出色。现在行业第一梯队具备自动驾驶能力的企业基本都已经一只脚迈进了端到端,并且当下自动驾驶系统已经实现了很好的自动驾驶表现,相信在技术不断高速迭代的背景下,汽车自动驾驶能很快能实现进一步的提升。或许正如何小鹏所说,在明年将迎来自动驾驶的“ChatGPT时刻”。